
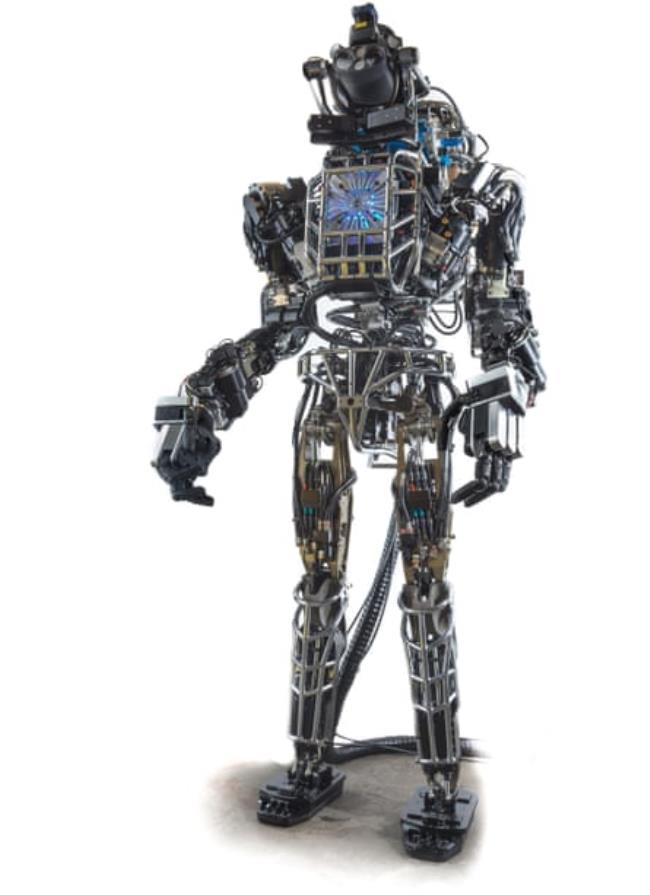
2013年,美国波士顿动力公司推出了新型人形机器人Atlas,身高6英尺2英寸。该机器人在Darpa机器人挑战赛上首次亮相,能够在不平坦的地面上行走、从箱子上跳下,甚至攀爬楼梯。这一场景仿佛来自科幻小说:一个被设计得与人类相似的机器人,能够完成各种日常任务,似乎预示着未来的曙光。机器人将承担我们所有繁琐的家务,并充当老年人的护理人员。
自那时以来,人工智能(AI)取得了显著进展,从计算机视觉到机器学习。最近一波大型语言模型和生成式人工智能系统为人机交互带来了新的可能性。然而,在研究实验室之外,实体机器人仍然主要局限于工厂和仓库,执行特定任务,通常被置于安全笼内。家用机器人仅限于吸尘器和割草机,远未达到科幻作品中的理想状态。
英国高级研究与发明局(Aria)机器人项目负责人珍妮·里德(Jenny Read)指出:“自上世纪50年代以来,机器人在身体结构上并没有实质性进展。”该机构是英国政府去年成立的研发机构。“我并不是说没有进步,但与计算机和软件领域的变化相比,进展显得微不足道。”
布里斯托尔大学(Bristol University)机器人与人工智能教授内森·勒波拉(Nathan Lepora)表示,开发机器人需要更多的资源。虽然有天才可以编写算法,但制造机器人需要物理设备。“这要慢得多,难度也大得多,”他说。“这就是机器人技术落后于人工智能的根本原因。”

研究实验室和公司正在努力缩小这一差距,多个新型人形机器人正在开发中,其中一些已经开始进入市场。今年4月,波士顿动力公司(Boston Dynamics)推出了新的电动版本Atlas,取代了原来的液压模型。该公司计划在未来几年内实现商业化,并将在明年于现代汽车(Hyundai)的工厂进行测试。总部位于俄勒冈州的Agility Robotics公司声称,他们的Digit机器人是第一个真正有报酬的人形机器人,能够在物流设施中搬运箱子。埃隆·马斯克(Elon Musk)则表示,特斯拉的人形机器人Optimus或Tesla Bot将于明年在其汽车工厂投入使用。
然而,在我们看到机器人在非控制环境中工作之前,仍有很长的路要走。里德表示,人工智能的进步只能在现有硬件条件下取得有限成果,而许多任务的完成依赖于机器人的物理能力。生成式人工智能系统可以创作诗歌或生成图像,但它们无法处理我们最希望自动化的肮脏和危险的工作。对于这些任务,仅仅依靠一个“盒子里的大脑”是不够的。
一个实用的机器人设计通常从手部开始。里德指出:“机器人的许多应用实际上依赖于能够精确、熟练地处理物体,而不损坏它们。”人类在这方面非常擅长。我们可以轻松地在举哑铃和拿鸡蛋壳之间切换,或者在切胡萝卜和搅拌酱汁之间转换。我们也具备出色的触觉,这可以从我们阅读盲文的能力中得到证明。相比之下,机器人在这方面则显得力不从心。里德的咏叹调项目(Aria)获得了5700万英镑的资金支持,专注于解决这一问题。
伦敦Shadow Robot公司的主管里奇·沃克(Rich Walker)表示,机器人灵巧性面临的挑战之一是规模。在公司位于卡姆登的办公室里,他展示了“影子灵巧之手”。这只手的大小与人类手相仿,拥有四个手指和一个拇指,模仿指关节的关节。尽管手指看起来精致,但这只手连接在一个比人类前臂宽得多的机器人手臂上,里面塞满了电子设备、电缆、执行器和操作这只手所需的其他组件。“这是一个包装问题,”沃克说。
人类手的一个优势在于其大小和形状适合使用人类工具。沃克举了一个实验室移液管的例子,他用Sugru(可成型的粘合剂)进行了改造,使其更符合人体工程学。虽然可以将移液器直接连接到机器人手上,但这样一来,它就只能使用移液器,而无法使用剪刀或螺丝刀。
然而,完全模仿人类的手并不适合所有任务。影子机器人最近推出的手DEX-EE看起来相当独特。它有三个手指,更像拇指而非手指,明显比人类的手大,表面覆盖着触觉传感器。该公司与Alphabet的人工智能研究实验室谷歌深度思维(Google DeepMind)合作设计了这款机器人手,后者希望通过反复尝试来学习如何捡起物体——这是一种被称为强化学习的试错方法。但这也带来了挑战:机器人的手通常被设计成不会撞击物体,如果发生碰撞则容易损坏。DeepMind的研究工程师穆里洛·马丁斯(Murilo Martins)表示,当他用最初的灵巧手进行实验时,“每半小时我就会折断一根肌腱。”
DEX-EE优先考虑坚固性:一段视频显示,这三个手指在被木槌击打时依然灵活开合。它的尺寸更大,可以容纳更大的滑轮,从而减轻钢丝肌腱的压力,这意味着它可以可靠地运行至少300小时。
尽管如此,DeepMind的研究科学家Maria Bauza表示,与机器人相处的时间是宝贵的。上周,DeepMind发布了一项研究,概述了一种名为DemoStart的新训练方法。这种方法采用了相同的试错方式,但从使用模拟的机器人手开始,而不是人类的手。在训练模拟手完成如拧紧螺母和螺栓等任务后,研究人员将这种习得的行为转移到真正的DEX-EE手上。“这些手仍然经历了成千上万的实验,”Bauza说。“只是我们没有让它们从零开始。”
这减少了运行实验的时间和成本,使得训练能够适应不同任务的机器人变得更容易。然而,这些技能并不总是完美地转移;DeepMind的模拟机器人手在插头插入插座的成功率为99.6%,而真实手的成功率仅为64%。
这项工作展示了人工智能与机器人身体发展如何相辅相成。只有通过物理互动,机器人才能真正理解它们的环境。毕竟,里德指出,像ChatGPT这样的文本生成器背后的大型语言模型是基于互联网上共享的大量人类语言数据进行训练的,“但我从哪里获得关于采摘草莓或制作三明治的感觉的数据?”
正如DeepMind机器人团队所言:“一个大型语言模型可以告诉你如何拧紧螺栓或系鞋带,但即使它被植入机器人体内,它也无法自己执行这些任务。”
马丁斯进一步指出,机器人技术对于实现人工通用智能(AGI)至关重要,这是许多人工智能研究人员梦寐以求的广泛、与人类相当的智能。他认为,人工智能只有具备物理形态,才能真正理解我们的世界。他说:“在我看来,没有化身,AGI就不存在,就像没有我们自己的身体,人类智能也无法存在。”
手虽然重要,但只是身体的一部分。当Shadow Robot和其他机器人专注于手指时,越来越多的公司和实验室正在开发完整的人形机器人。
类人机器人的吸引力部分源于心理因素。沃克表示:“这是我们都期待的机器人,就像C3PO一样。”但以人类形态作为灵感来源也是有道理的。Agility Robotics的联合创始人兼首席机器人官乔纳森·赫斯特(Jonathan Hurst)表示:“我们的环境都是围绕人设计的。因此,拥有一个大致人性化的外形是一种非常好的方式,能够移动、操纵和与人共存。”
然而,类人机器人并不一定是所有工作的最佳设计。轮式机器人可以到达轮椅使用者能够到达的任何地方,而在复杂地形中,四条腿可能比两条腿更具优势。波士顿动力公司的Spot机器人能够在崎岖的地面或楼梯上灵活移动,甚至在摔倒后能够自我恢复——这是两条腿的机器人难以做到的。波士顿动力公司的一位发言人在电子邮件中补充道:“仅仅因为人形机器人的外形与人类相似,并不意味着它需要以相同的方式移动,也不意味着它需要受到我们关节的限制。”

目前,类人机器人仍在探索阶段。布里斯托尔大学的勒波拉表示,华丽的视频和时尚的设计可能会给人们一种不切实际的印象,让他们误以为机器人有多能干或可靠。波士顿动力公司的视频片段令人印象深刻,但该公司也以展示其机器人失败的错误视频而闻名。今年1月,马斯克分享了一段擎天柱叠衬衫的视频,但细心的观众发现了机器人被远程操作的迹象。
将机器人从实验室和工业环境带入家庭或公共场所的一个主要挑战是安全。今年6月,电气和电子工程师协会(IEEE)成立了一个研究小组,专门研究人形机器人的标准。该组织主席亚伦·普拉瑟(Aaron Prather)解释说,共享空间中的人形机器人与被保护笼子包围的工业机器人是不同的命题。他说:“对他们来说,与亚马逊工厂或福特工厂的同事互动是一回事,因为这是一名训练有素的工人与机器人一起工作。但如果我把机器人放在公园里,它将如何与孩子们互动?它将如何与那些不了解发生了什么的人互动?”
赫斯特设想,下一步机器人将进入零售业,负责在货架上摆放物品或在密室中工作。普拉瑟认为,我们很快就会看到机器人为我们服务。然而,对于许多应用来说,使用机器人可能并不具备经济效益。沃克举了一个送货机器人的例子,他表示:“与那些拿着最低工资、零时工合同、骑电动滑板车的人相比,这必须具有成本效益。”
与我交谈过的大多数机器人专家都表示,多功能家用机器人——那种能洗碗、洗衣
本文来自作者[一只云倾]投稿,不代表八木号立场,如若转载,请注明出处:https://hlj.cnbmelink.com/wdcf/202412-844.html
评论列表(4条)
我是八木号的签约作者“一只云倾”!
希望本篇文章《“这就是我们都期待的机器人——就像C3PO一样”:为什么类人机器人还没有出现在我们的家中?》能对你有所帮助!
本站[八木号]内容主要涵盖:国足,欧洲杯,世界杯,篮球,欧冠,亚冠,英超,足球,综合体育
本文概览: 2013年,美国波士顿动力公司推出了新型人形机器人Atlas,身高6英尺2英寸。该机器人在Darpa机器人挑战赛上首次亮相,能够在不平坦的地面上行走、从箱子上跳下,甚至攀爬...